
Eigen使用BLAS/LAPACK作为backend
关于openblas的配置与编译请参考之前写的文章《Rock5a之配置OpenCV4.10与Orbbec Astra Pro使用》 openblas在arm架构系统上运算矩阵速度比eigen原生快了不止一点 Eigen 3.3之后的版本可以调用BLAS和LAPACK作为backend, 使用方法也很
关于openblas的配置与编译请参考之前写的文章《Rock5a之配置OpenCV4.10与Orbbec Astra Pro使用》 openblas在arm架构系统上运算矩阵速度比eigen原生快了不止一点 Eigen 3.3之后的版本可以调用BLAS和LAPACK作为backend, 使用方法也很
在qt中开发不考虑跨平台,可以使用vlc-qt-sdk,是vlc-sdk的qt封装好的,更适合开发,但是官方,没有适配arm版本的macos,官方平台只有适配x86-macos的预编译版本与windows版本。如果要通过源码编译,但是源码中也是没有支持arm版本的macos。所以只能使用vlc官方的
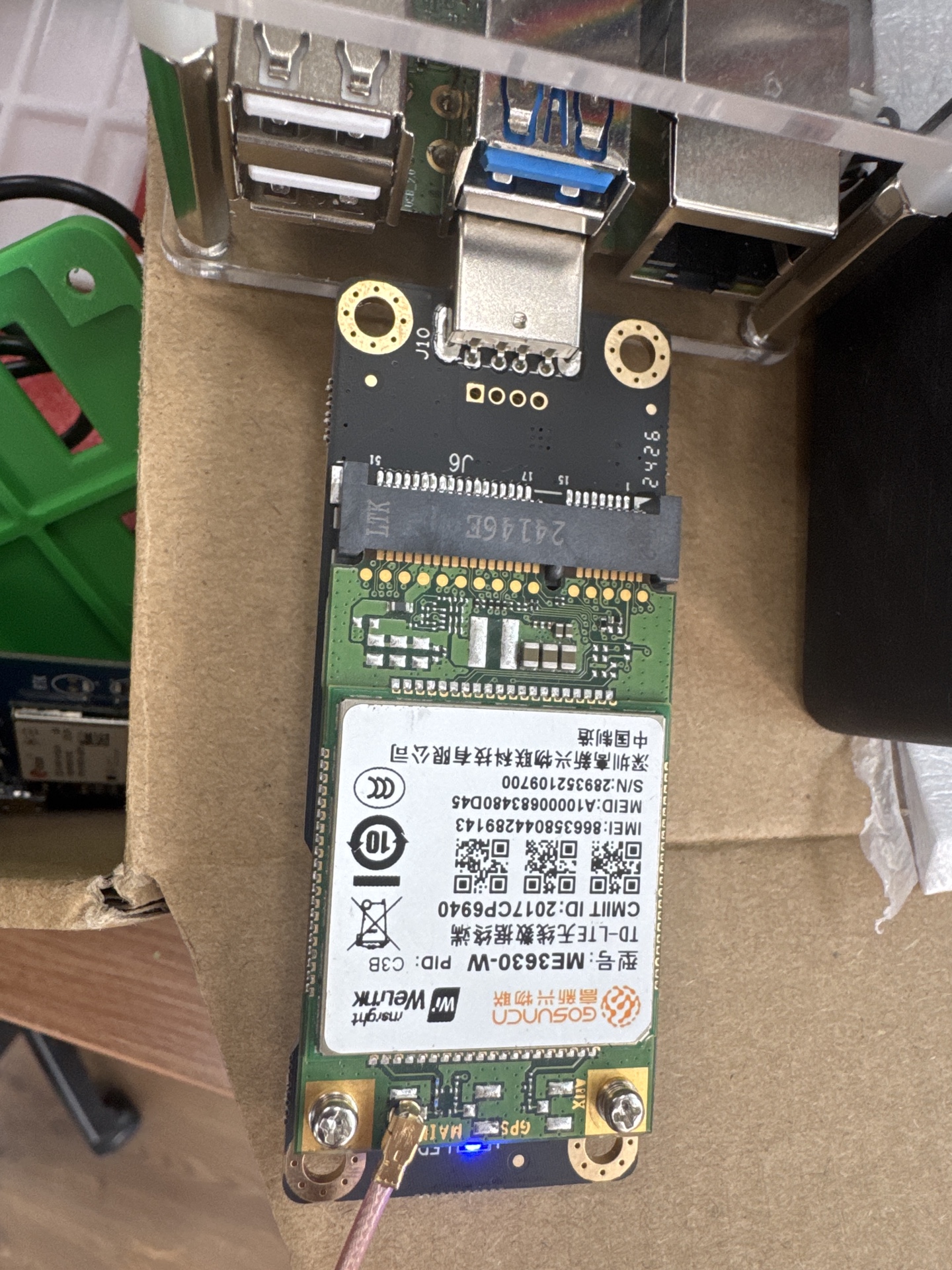
ECM(Ethernet Control Model,以太网控制模型)是一种基于 USB CDC(通信设备类)的网络连接方式。4G 模块通过 USB 模拟以太网设备(如 usb0),主机端将其识别为网络接口,直接通过 DHCP 获取 IP 地址。 连接过程 把ME3630通过转接板,通过usb接口连
先前要使用rock5a rk3588s芯片中的pwm通道作为两个电调的输入信号使用。 查阅资料,在rsetup中打开相对应的pwm-gpio后,发现可以通过用户空间直接操控pwm频率,占空比。 其用作电调的控制是足够的,但是想更进一步,把pwm编写为字符设备驱动程序。 esc-pwm驱动程序编写 这
Debian APT系统代理 Debian不同于Ubuntu,前者需要进行很长的手动操作,才能实现terminal的代理 打开 vim ~/.bashrc 输入 alias proxy=" export http_proxy=http://127.0.0.1:7890; export
apple自带VNC连接ROCK5A cmd + space 输入screen 打开屏幕共享 右上角➕
ARM架构double计算比float计算快现象 在评估rk3588处理器性能发现,现在处理器计算双精度浮点比单精度浮点要快上不少,其测试程序如下 int main(){ auto a = HAL::time().ns(); float f1 = 0.1; for (in
ArduPilot源码阅读——Location篇 location class类中有很多关于经纬度计算 小距离内近似获取方向角 获取当前this对象相对于loc2对象的方向角 这里采用了一种近似算法,把经纬度球面坐标系在小范围内(10KM)近似为平面直角坐标系, 采用NED形式,x轴指东表示经度,y
ArduPilot源码阅读——上层运动模式篇(Guided for boat) 设置目标点 函数调用时机:这一目标点结束后调用; 如果目标点队列为[10,10];[20,20];[30,30], 首先调用set_desired_location([10,10], [20,20]) 表示从原点(默认[
ArduPilot源码阅读——底层油门转向篇 低通滤波器 在AC_AttitudeControl_Sub中写到了一个使用低通滤波器,来防止突然变化的高度信息,使控制器缓慢达到目标值 _althold_lean_angle_max = _althold_lean_angle_max + (_dt/(_

随风而行
![]()