
ICM42688 SPI读取异常 故障排查
问题导论 自从两个月前买到手ICM42688这款来自TDK的IMU后,就一直有数据读取偶尔异常的问题。 排查步骤1: CSDN看到评论说是SPI极性问题,于是把SPI模式调整为模式3,再重新读写后发现,并不奏效。 链接:https://blog.csdn.net/NoDistanceY/articl

问题导论 自从两个月前买到手ICM42688这款来自TDK的IMU后,就一直有数据读取偶尔异常的问题。 排查步骤1: CSDN看到评论说是SPI极性问题,于是把SPI模式调整为模式3,再重新读写后发现,并不奏效。 链接:https://blog.csdn.net/NoDistanceY/articl
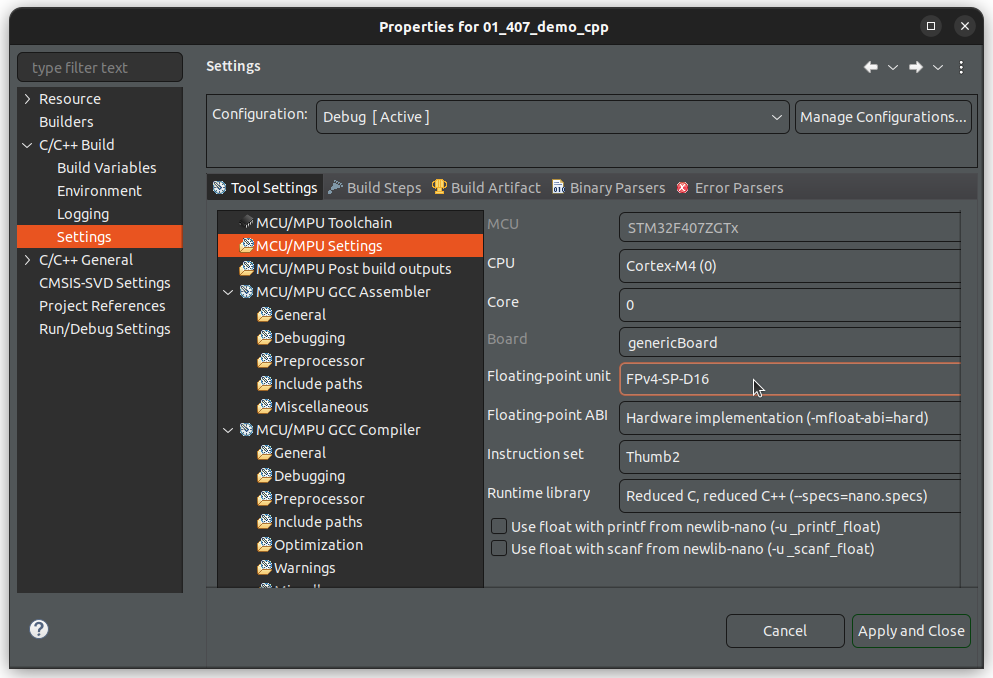
开发环境 Stm32f407zgt6 CubeIDE 如何配置 在默认情况下,FPU一般为开启的, 在cubeide中可以在项目属性Properties -> C/C++ Bulid -> Tool Settings -> MCU/MPU Setiing 中看到 Floating-point-uni
ST公司推出的针对于STM32系列单片机的图形化编程工具CubeIDE,这里以STM32F407为例,记录经常使用的操作。 必备操作 配置外部时钟 配置SW调试串口
值得逛的站点 西北工业大学高精度捷联惯导开源算法网站 西工大是国内惯导研究初创者,由于其军事背景,惯导研究国内第一。 武汉大学多源智能导航实验室 武汉大学以测量
流程框图 StereoRealTime.cc #include<iostream> #include<algorithm> #include<fstream> #include<iomanip> #include<chrono> #include<opencv2/opencv.hpp> #incl
/* * Class —— StereoCamera * 方法: * 初始化双目相机参数 * 创建视频读取到队列容器线程 * 获取队头图像 —— 如果为空自动等待 * 获取队头时间帧 —— 如果为空自动等待 * pop,
#include <iostream> #include <thread> #include <mutex> #include <chrono> #include <queue> #include <opencv2/opencv.hpp> /* * 定义一些输入量 * FramInputPe
模型量化是指将深度学习模型中的浮点参数和操作转换为定点表示,如 FLOAT32 转 换为 INT8 等。量化能够降低内存占用,实现模型压缩和推理加速,但会造成一定程度的 精度损失。 尝试新模型 yolov5s_relu——relu激活函数模型 yolov5s_i8——fp浮点量化成i8八位整形的模型
sudo运行程序 找到不到动态链接库 ldd ./serialTest 可以找到libserial.so.1 sudo ldd ./serialTest
依赖 sudo apt install autoconf autoconf-archive libtool 安装 mkdir build ./autogen.sh --program-perfix=<!安装路径必须是绝对路径!> --enable-bindings-cxx make make ins

随风而行
![]()